Modelling:Muscles
Second layer of the tanukis, activating the bones: the muscles. It's a important part for the external shape of the avatar, because the musclar structure will define the shape of its skin.
It is strongly suggested to read the skeleton study before reading this: concepts and nomenclature of bones are not re-explained.
Contents
Rigging
To make sure my intuition was right, I've made a quick test of muscle animation using very simple armature:
- Each muscle is attached to 2 bones.
- Only one loop of vertices in the middle of the muscle.

Animation test:
Result is trashy.
Stretching the bone
In blender, bones can be constrained. One of the availabe constraints is Strecth to. Empties have to be attached to the target bone, at the anchor position on that bone. The test here contains:
- a spine - vertical bone
- 2 vertebras bones, perpendicular to spine
- 1 scapula - horizontal bone
Three extra bones have been created, one for each muscle. From bottom to top:
- m_spine_#scapula
- m_vertebra_#scapula
- m_vertebra01_#scapula
Each of the muscle bones is parented with the bone first bone mentionned in its name, and target the bone metionned after the #.
m_[parent bone]_#[target bone]


Some errors occurs in extreme bendings, but, generally, result is much better. A calculation has to be done at each frame. It is not standard in RT, so it will have to re-implemented in the game engine.
Curved muscles
For some articulations (wrist, knee, elbow, etc), muscles have to go around the bone "bubble" - see knee study.
Rigging and skinning will be complex to do blindly. Therefore, it is important to find a way to verify the behaviour of the mesh in blender.
The video is a reminder.
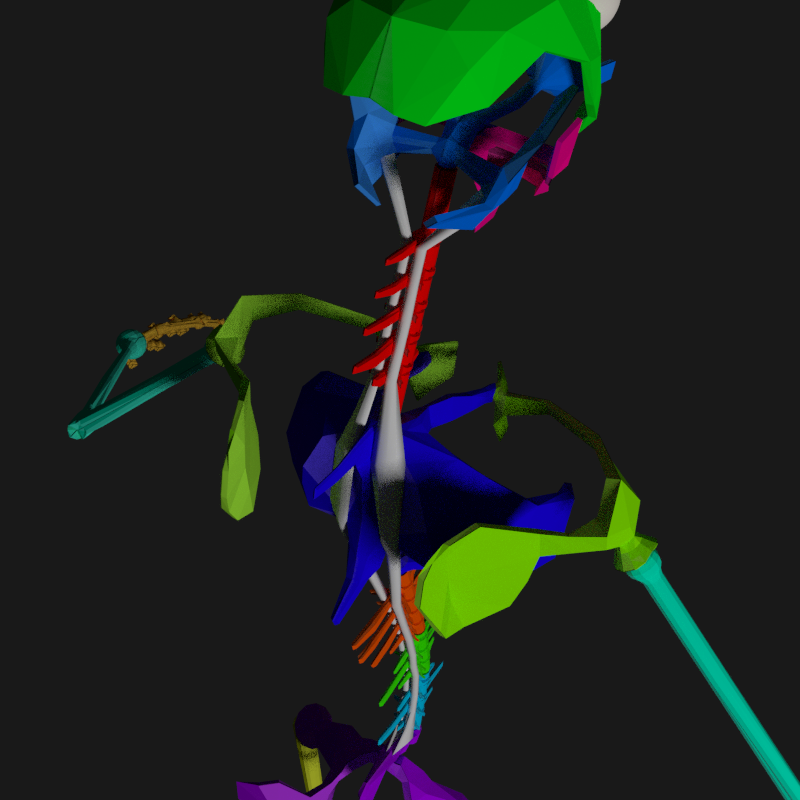
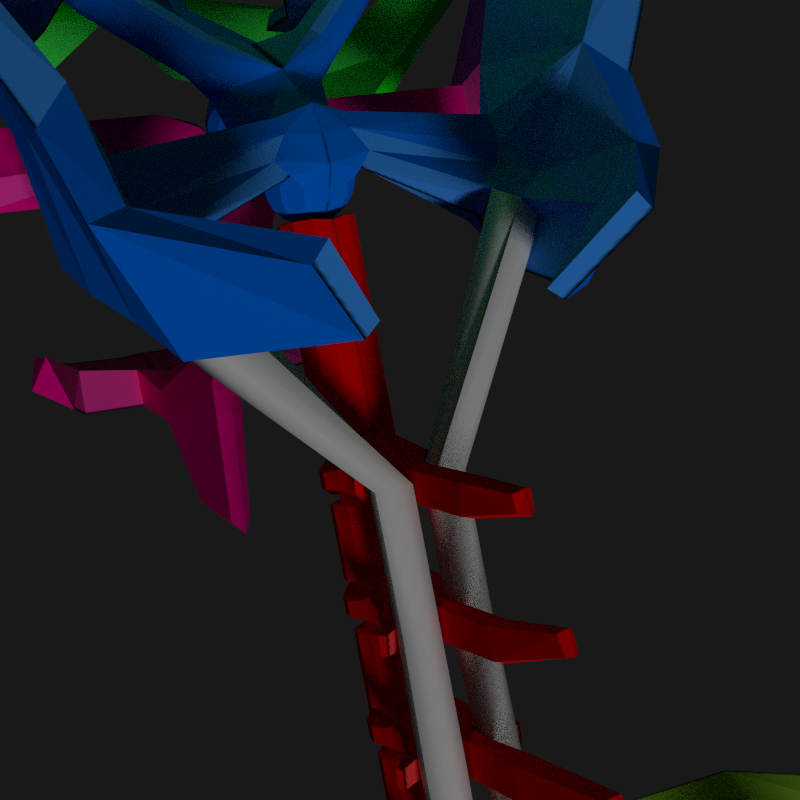
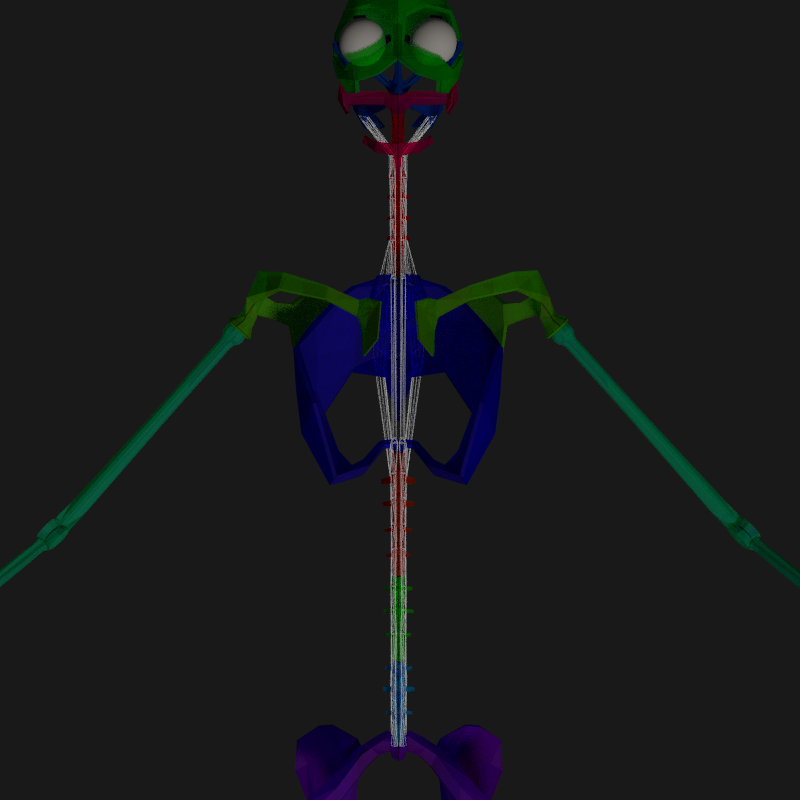
Scapular structure
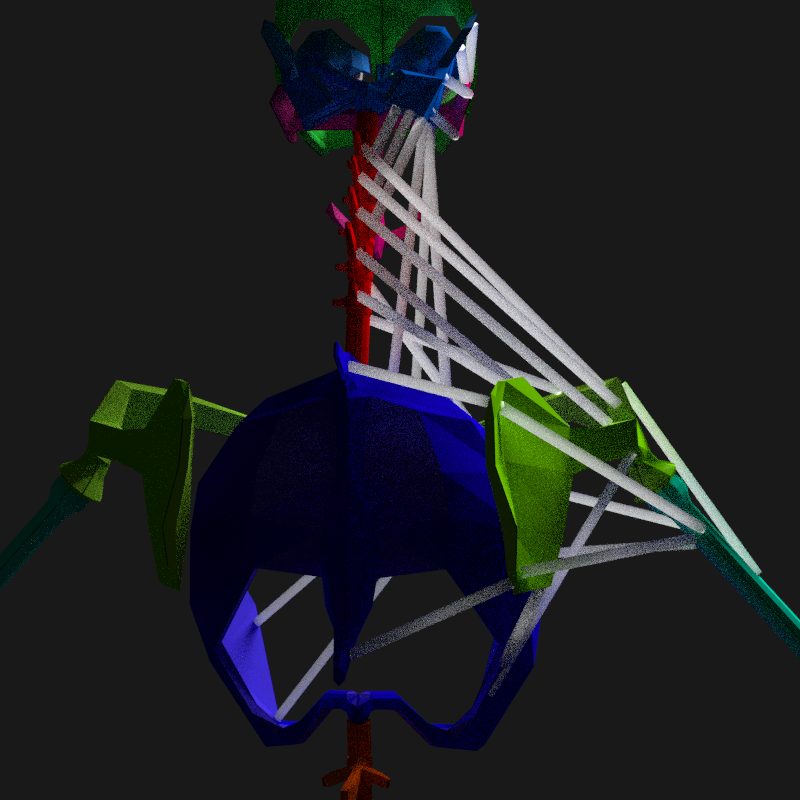
First try to place the muscles on the skeleton. Trying to place them to allow plausible motion without too much collision problem when they will be animated. It is only vectors to give the direction, the modelling will come later.
The muscles for now are
- puller only, not piston;
- straights, meaning they can't touch and be deformed by muscles under
Right side only.
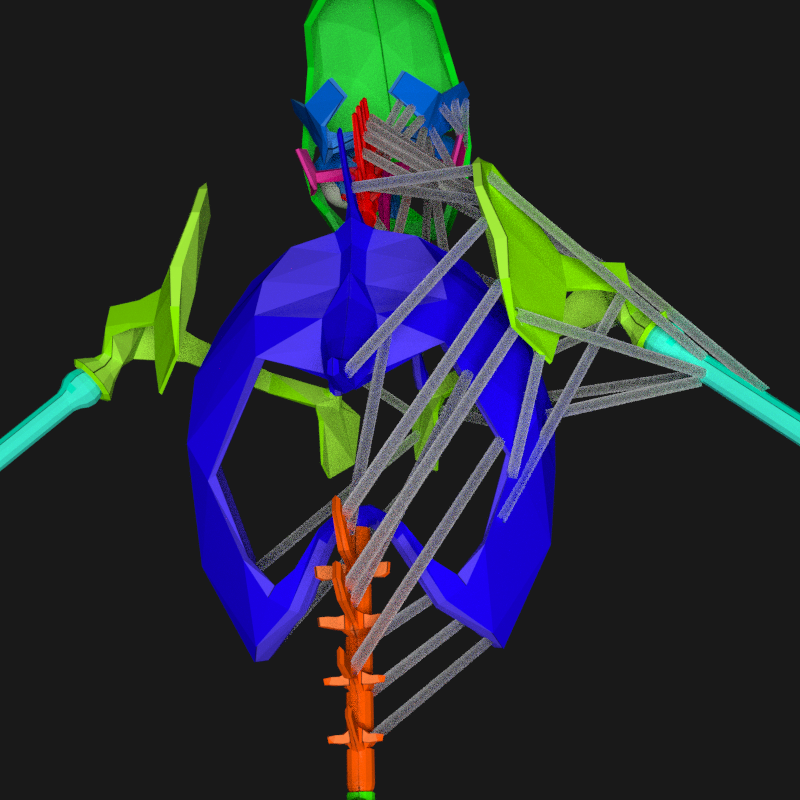
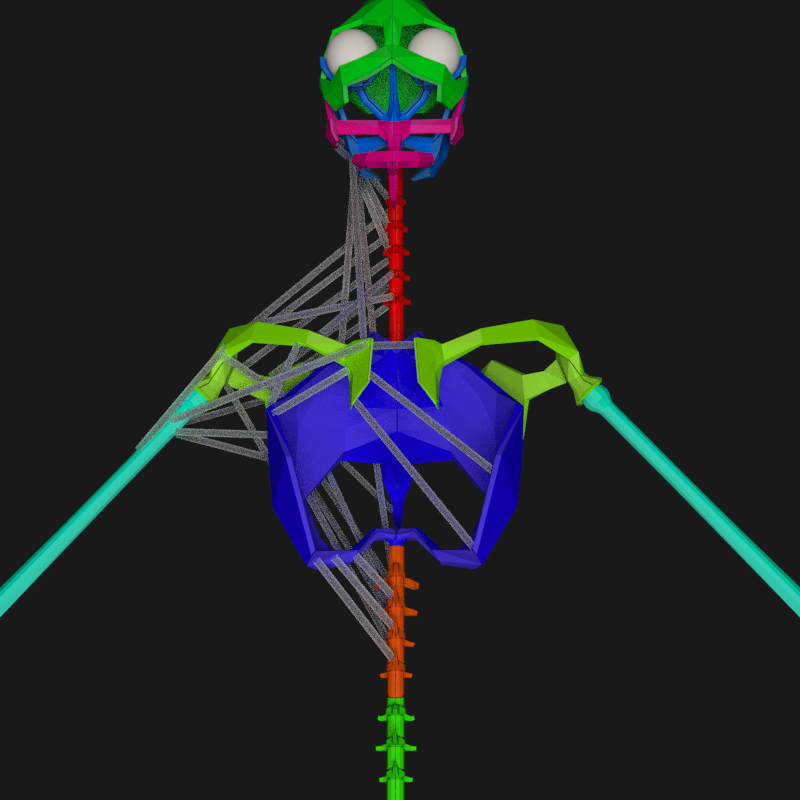
Humerus needs mesh adatptation to link large muscles, especially the one coming down from the scapula.
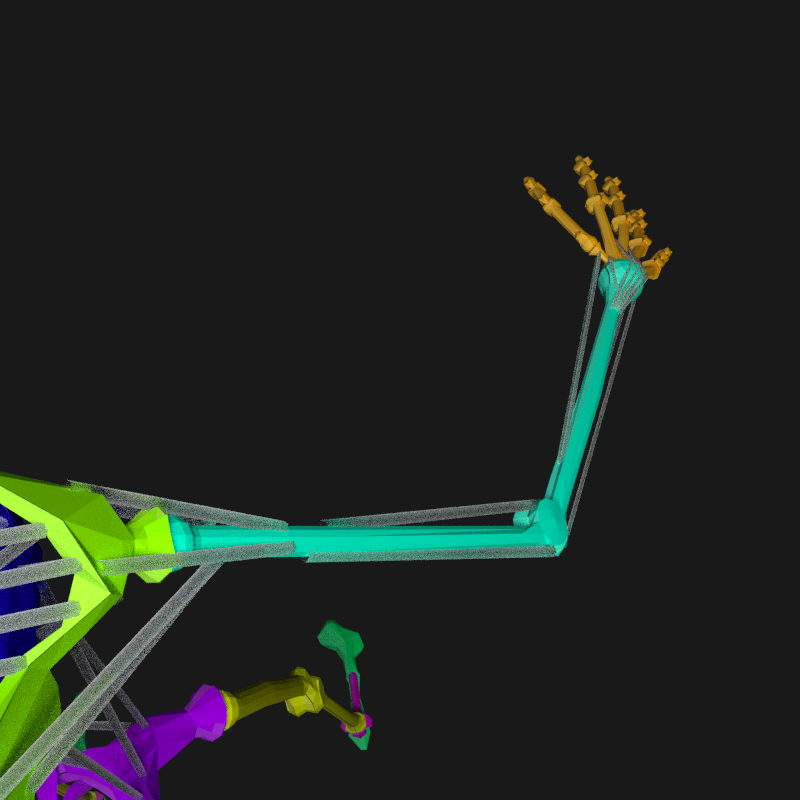
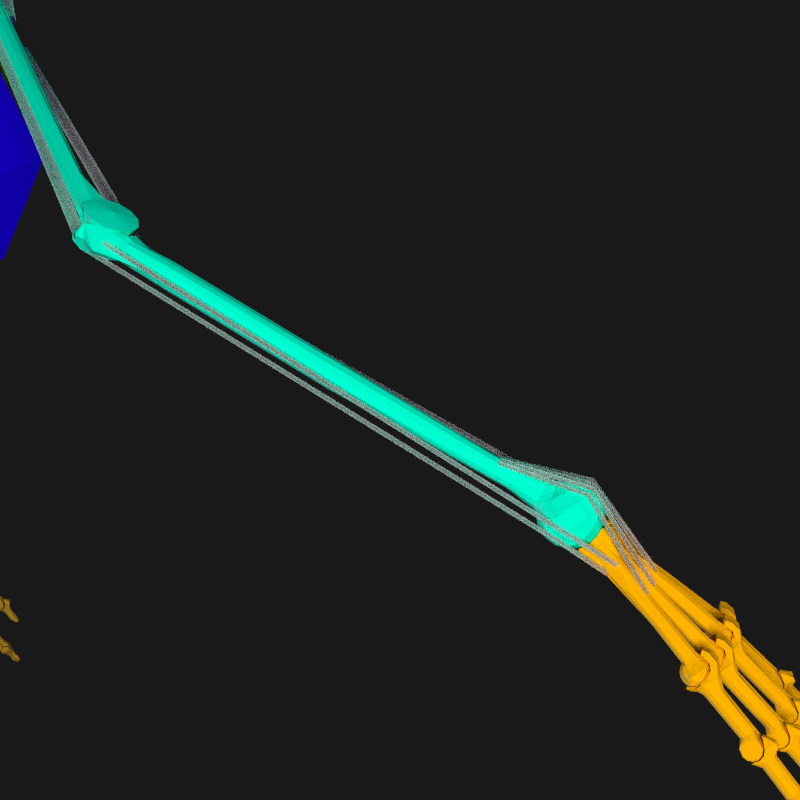
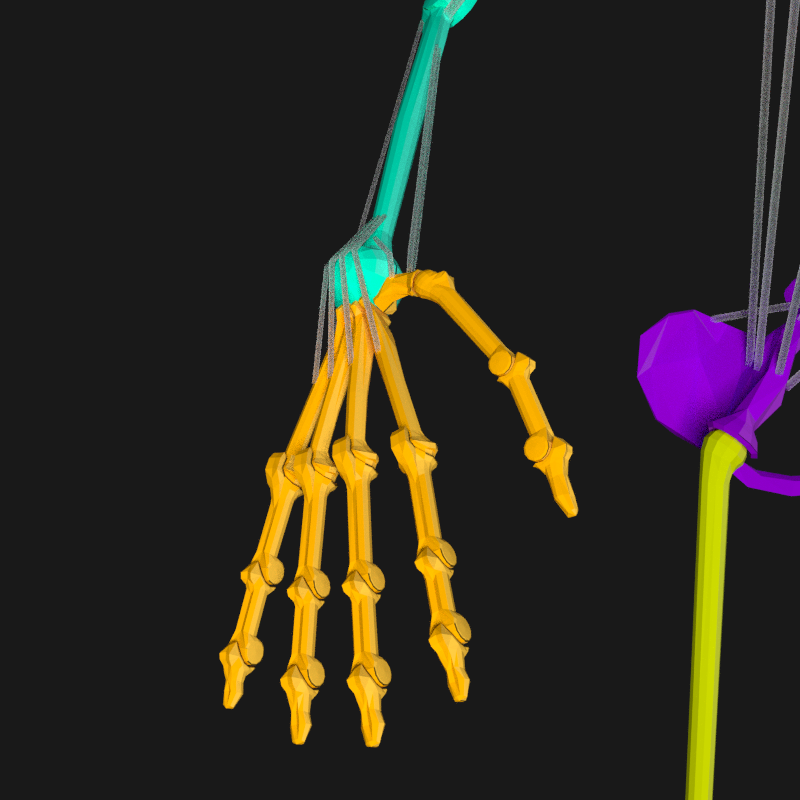
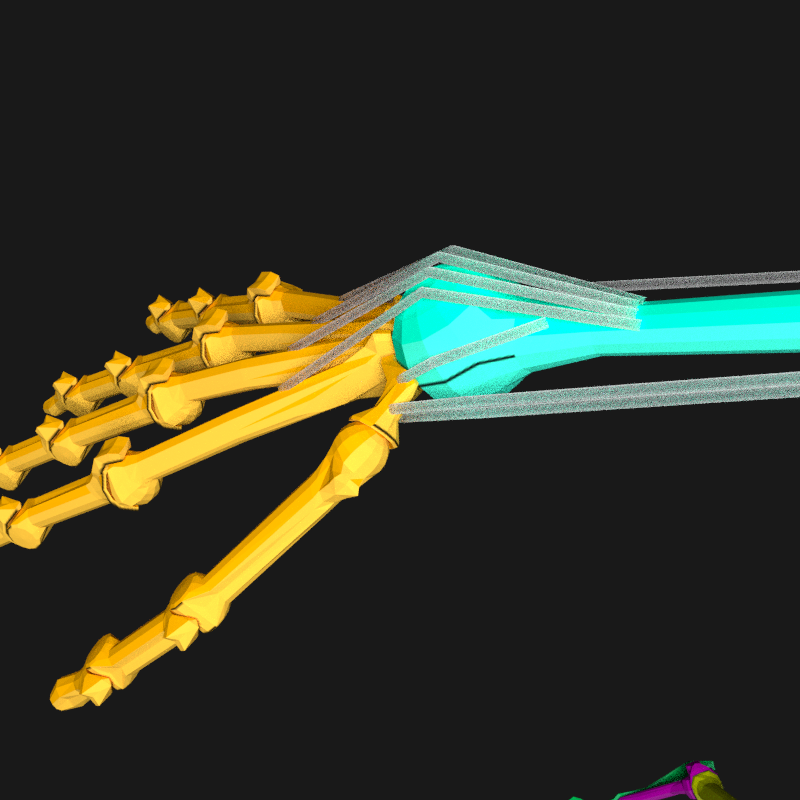
Wrist and metacarpian
Nomenclature
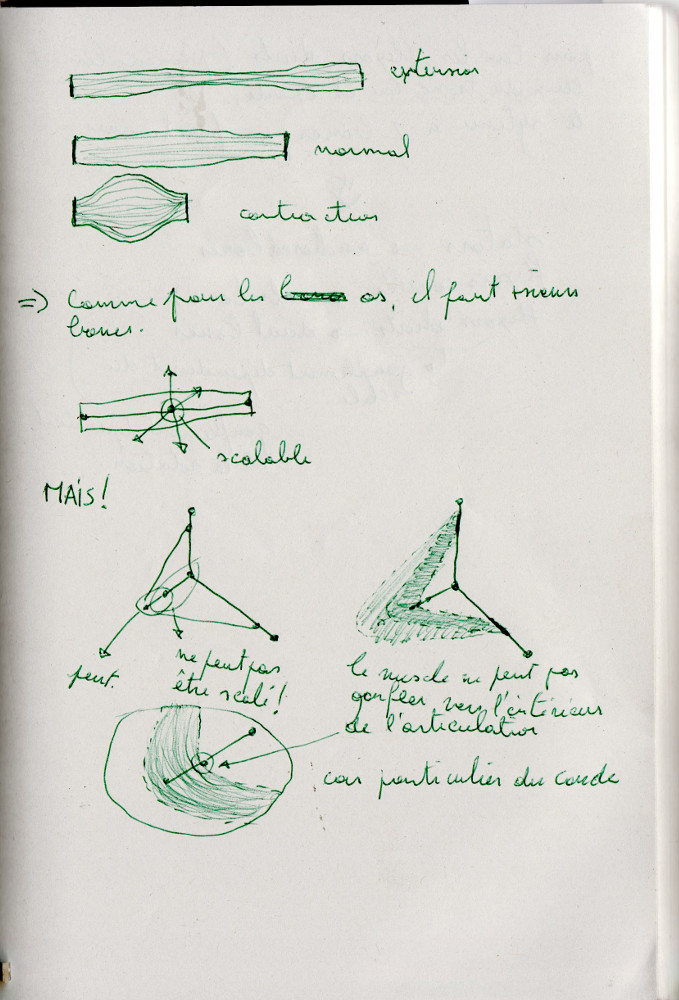
After some technical studies in blender, it is time to step back and think a bit. I do this kind of process in my sketchbook. All terms I define are a summary of the notes scanned here below (in french).
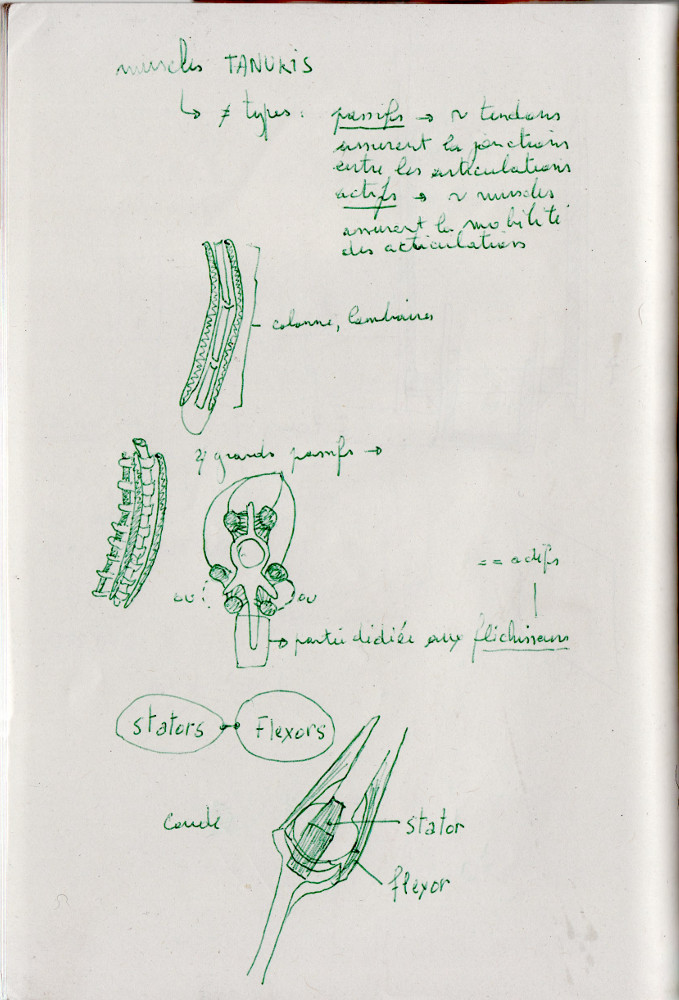
First important distinction, there are 2 major kind of muscles:
- passive ones, similar to tendons - their role is to bring back the articulation in its rest state, and ensure the contact between 2 or more mbones;
- active ones, similar to muscles - their role is to bend the articulations; they act in opposition to the passive muscles.
To simplify the notes, they all are called activators[1], and splitted in 2 main groups:
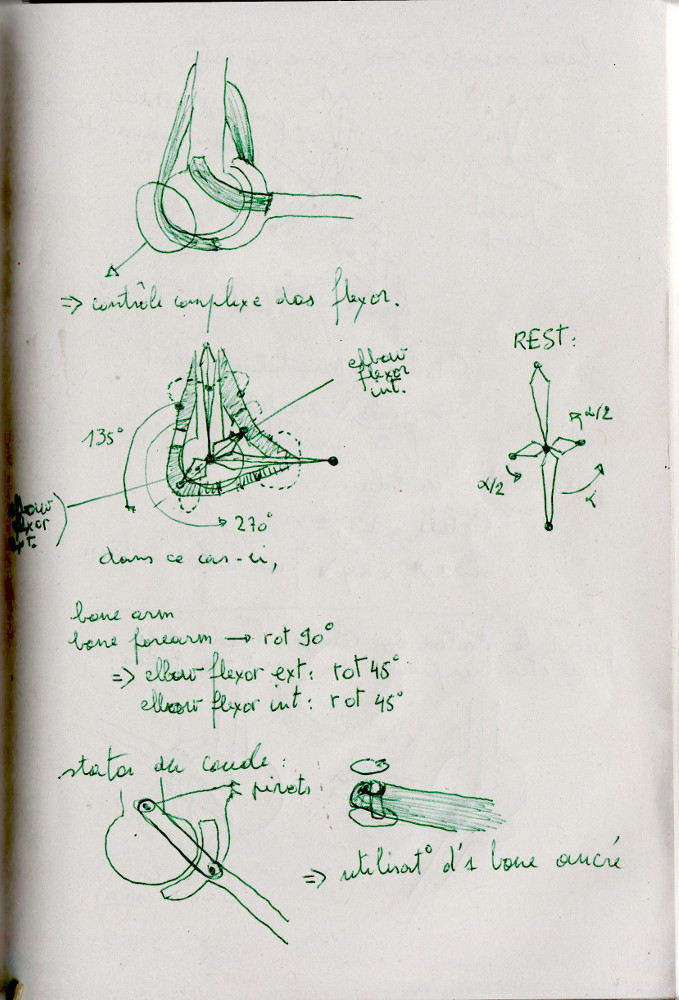
Flexors can be of 3 types, depending on the shape of the articulation they are attached to:
- straight[4], requires a simple abone;
- inflatable[5], requires at least 2 abone to control the volume modification at the middle of the activator see sketch;
- curved[6], uses a different type of control abone;
- rotor[7], requires a simple abone;
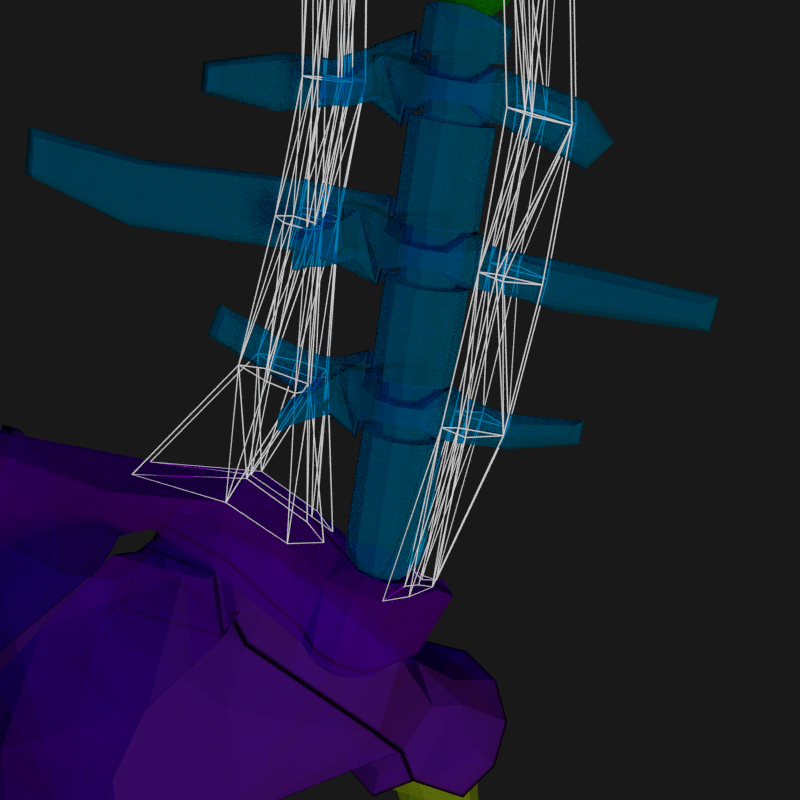
Stators can be of 3 types, depending on the shape of the articulation they are attached to:
- rotor[7];
- cord[8], typically the 4 activators wrapping the neck and lumbar vertebrae, they don't require extra abone.
Table of possible mix between kind and type:
| Activator | Stator [2] | Flexor [3] |
|---|---|---|
| straight [4] | X | V |
| inflatable [5] | X | V |
| curved [6] | X | V |
| rotor [7] | V | V |
| cord [8] | V | X |
Flexors may have two types, curved and rotor, fro instance.
Remarks: in the wrist case, flexors are wrapping nearly completly the articulation. Therefore, it not necessary to use stators. Same remark for metacarpals and phalanges, the articulations are tiny enough to be kept together by the 4 flexors that activate them.







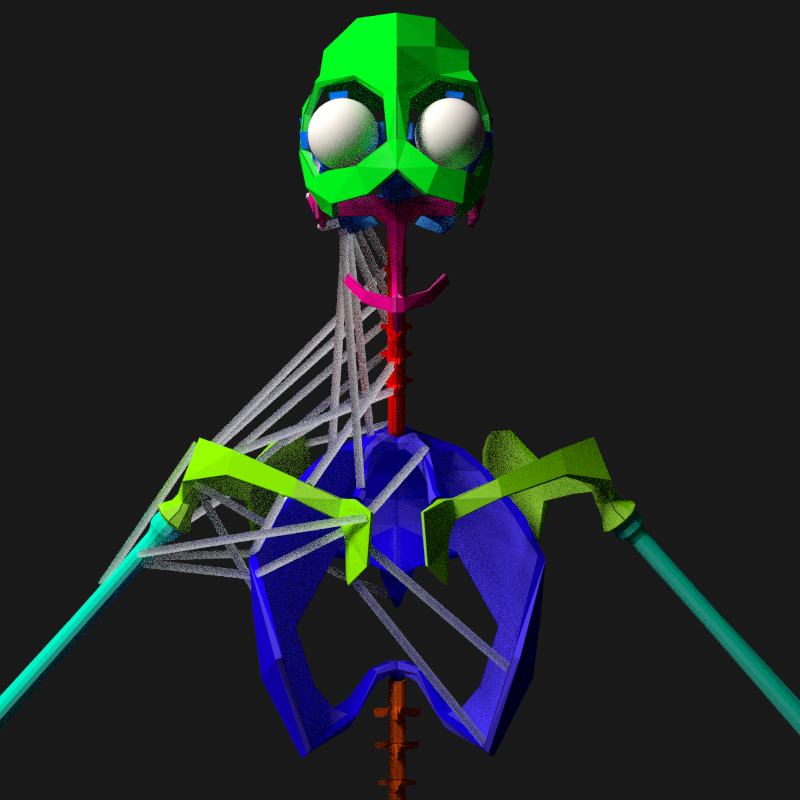
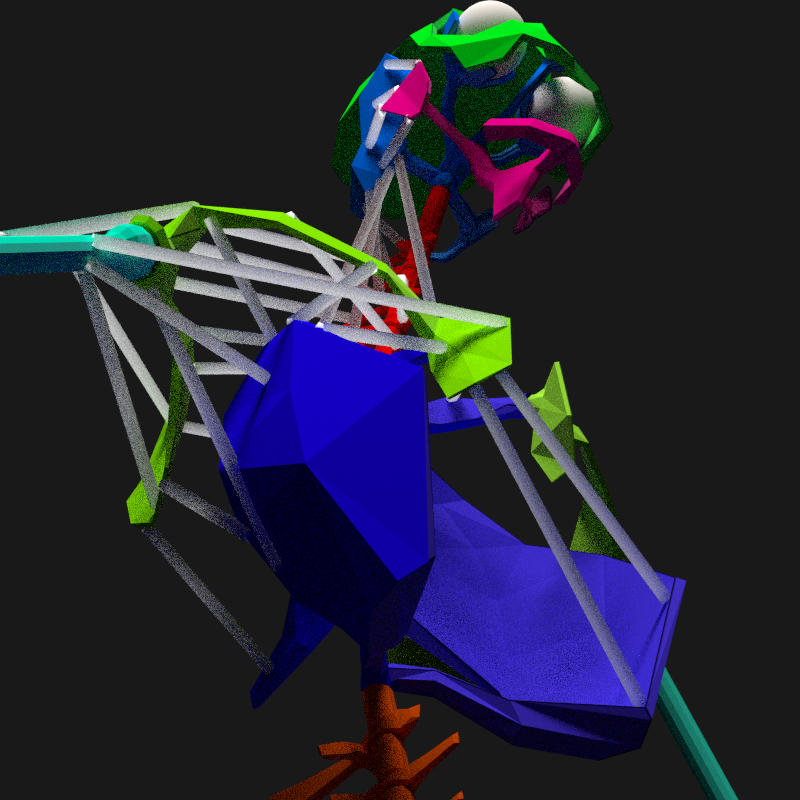
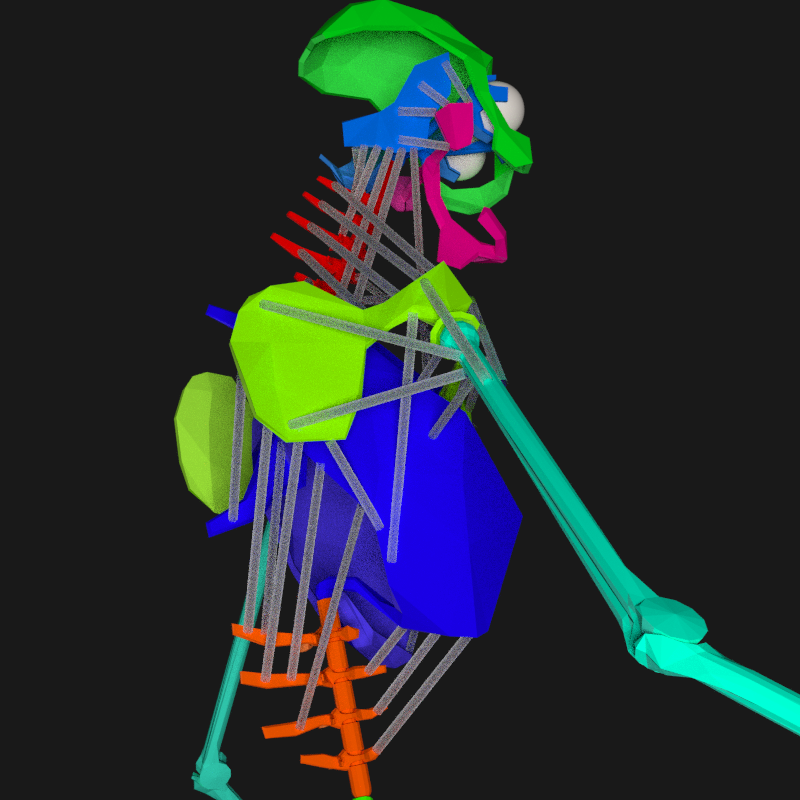
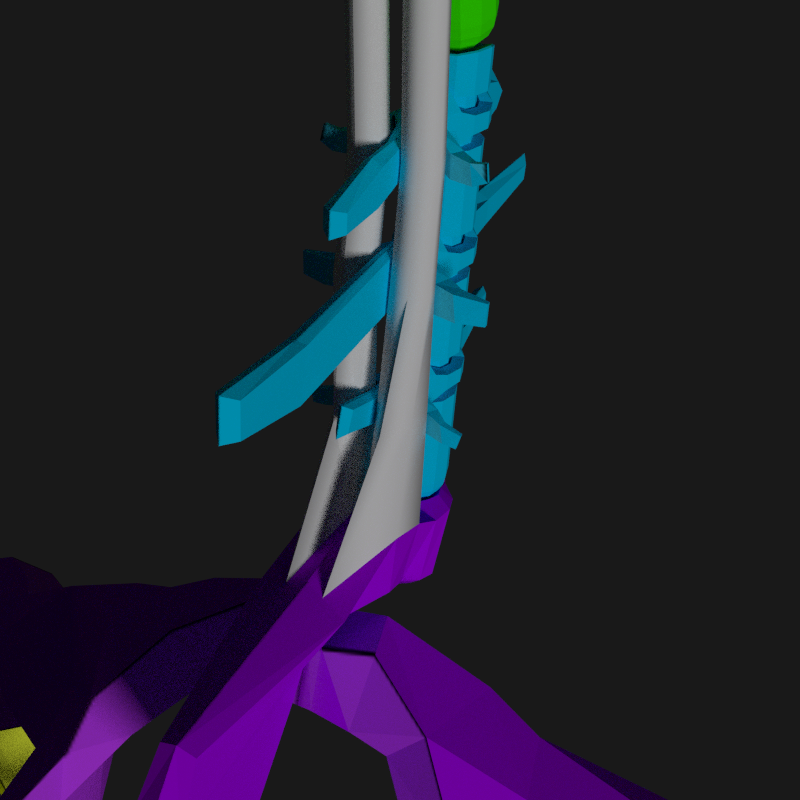
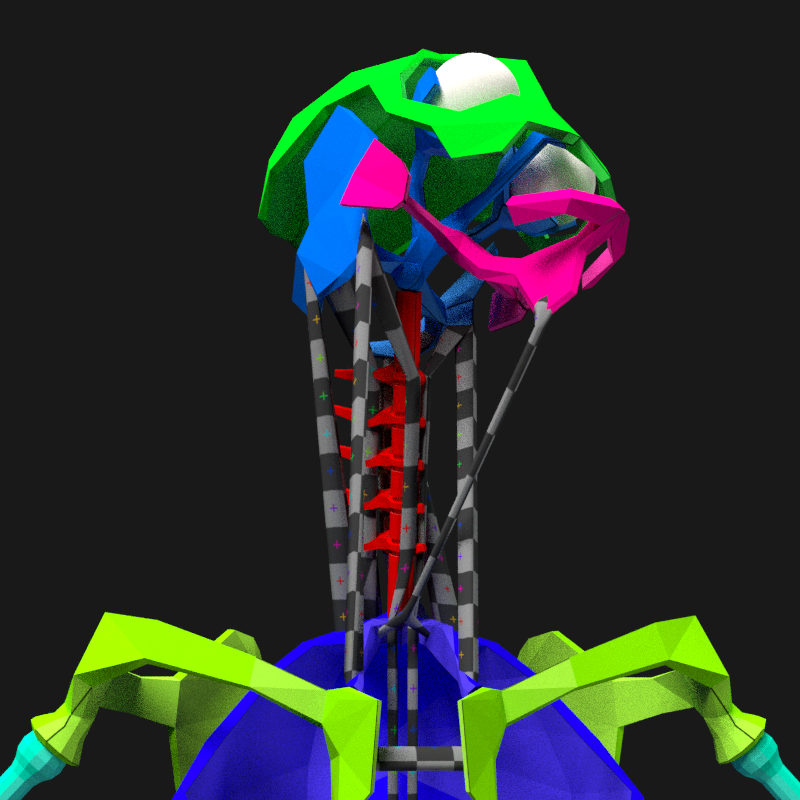
Spinal stator
Modelling of the stator. It goes from hips to skull basis, with flat connections on the thorax mbone. There is a bit of space to each vertebra's process to avoid a the collision problem as mush as possible. Will be fixed after the first skinning.
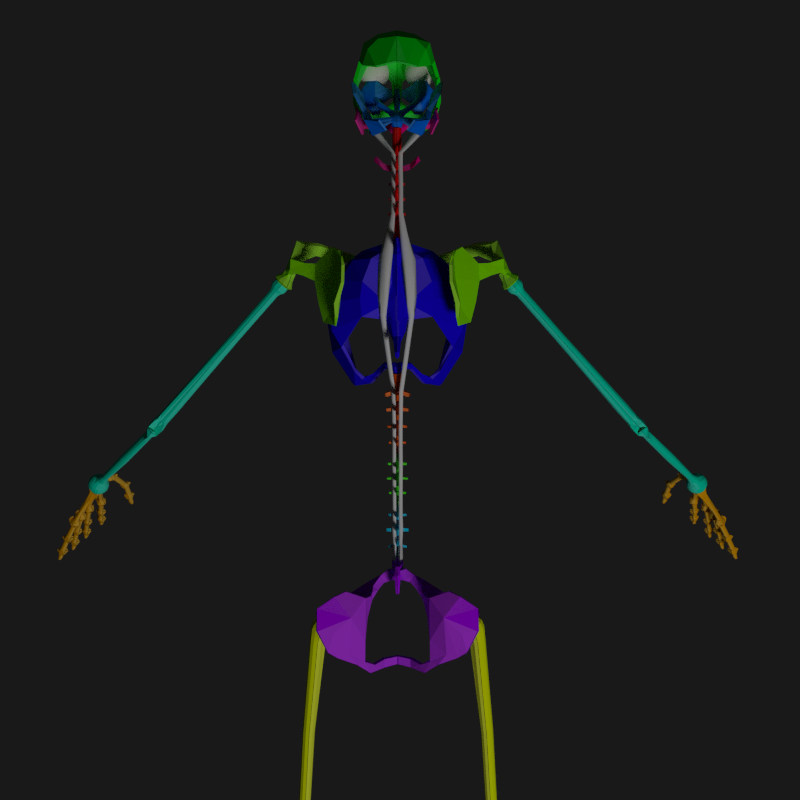
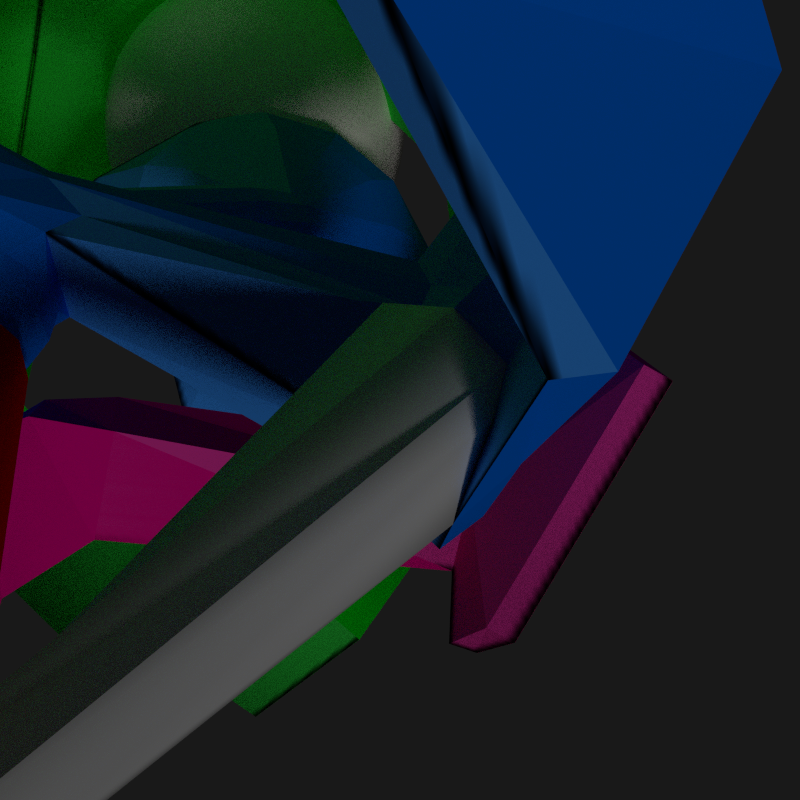
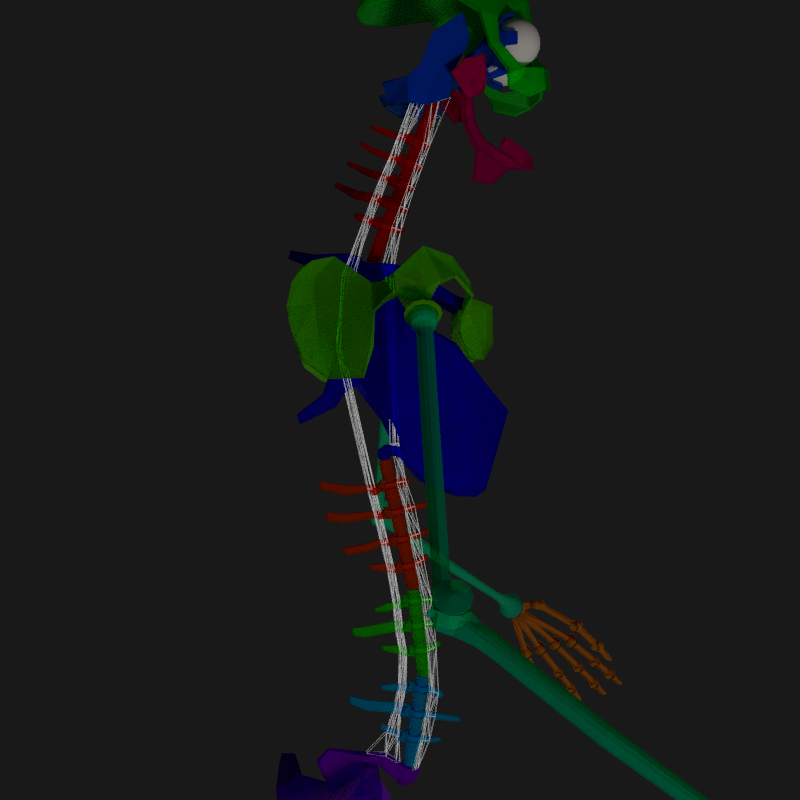
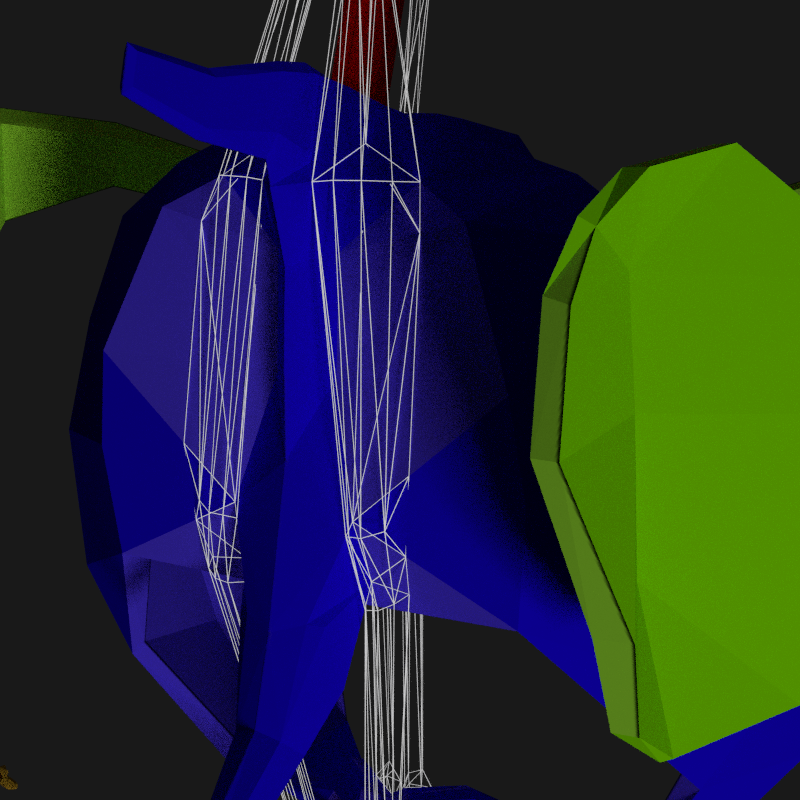

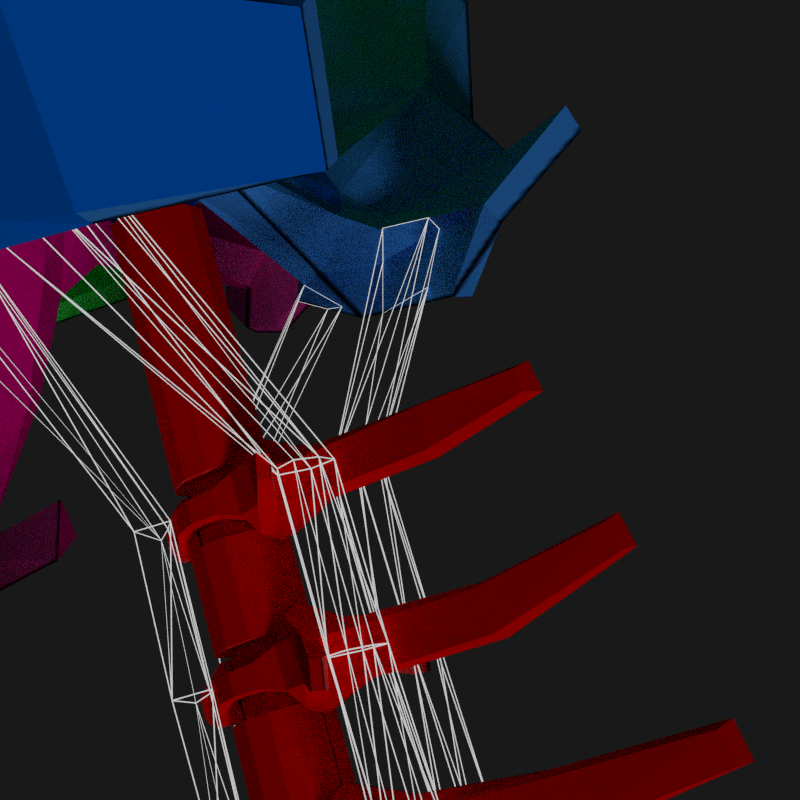
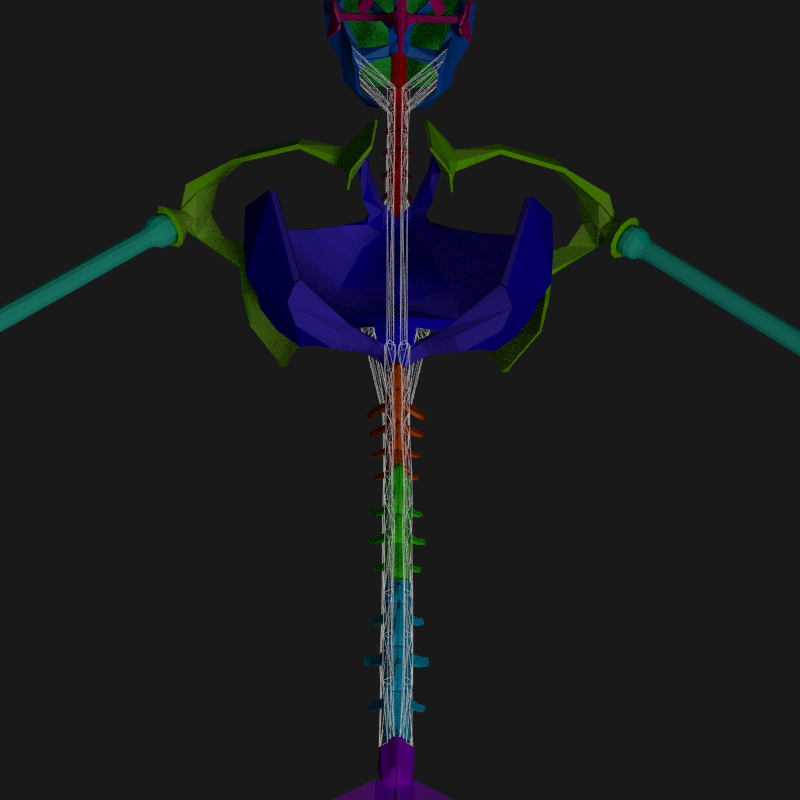
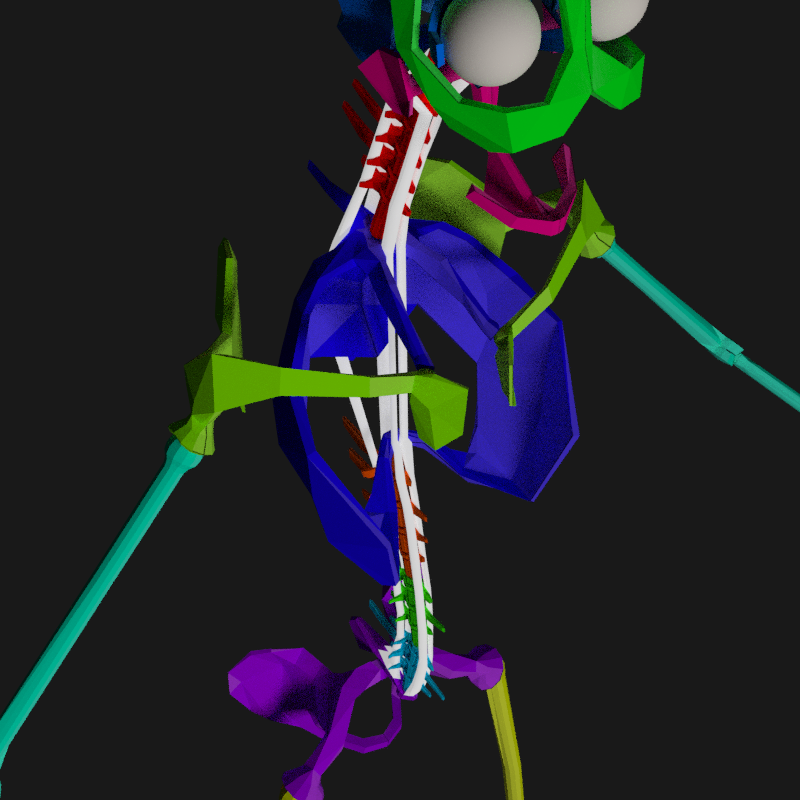

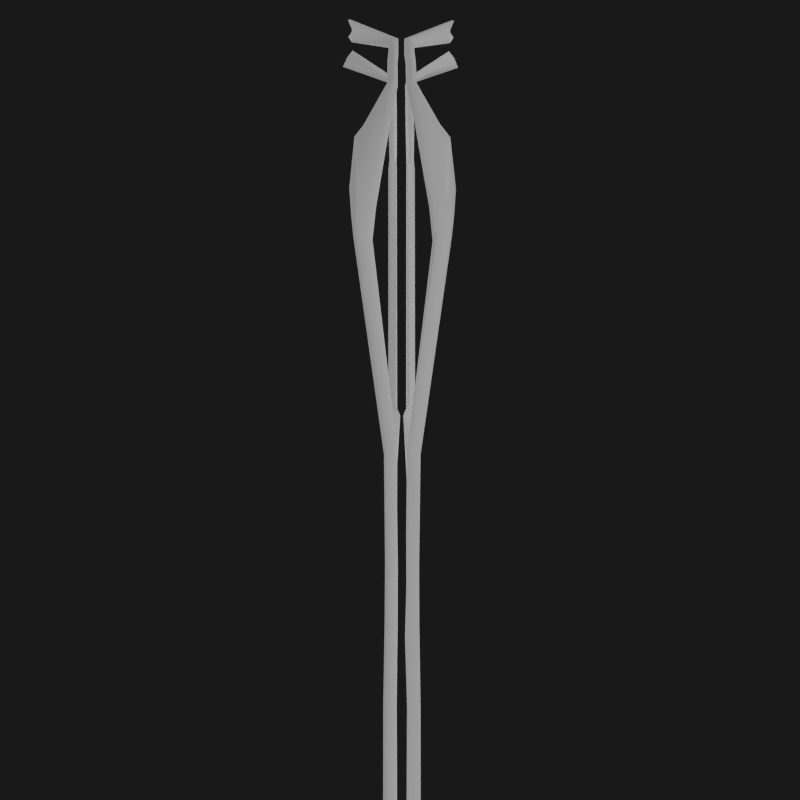

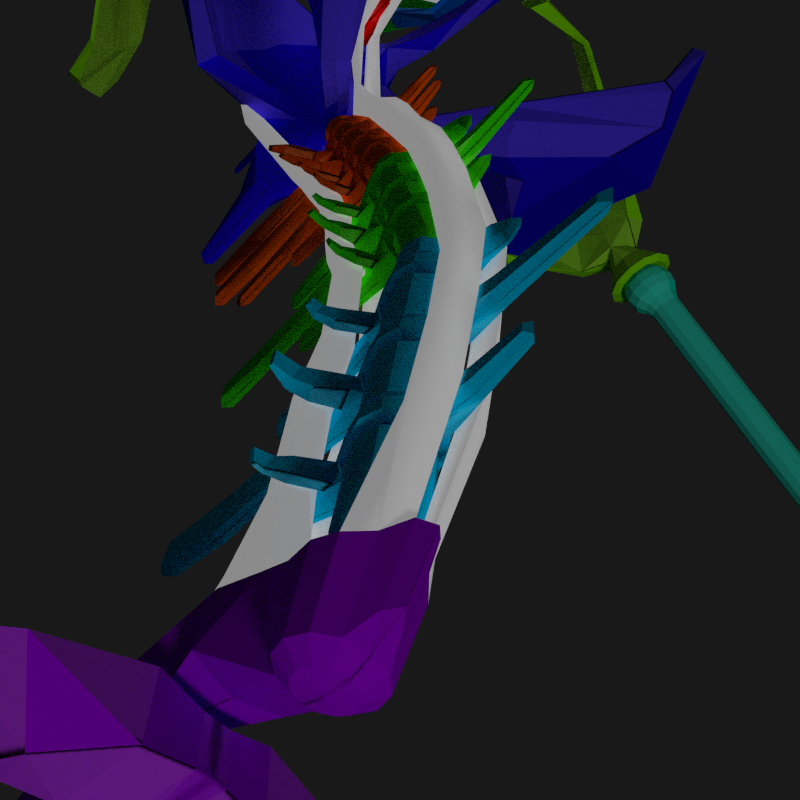
After rigging to abones and addition of drivers:
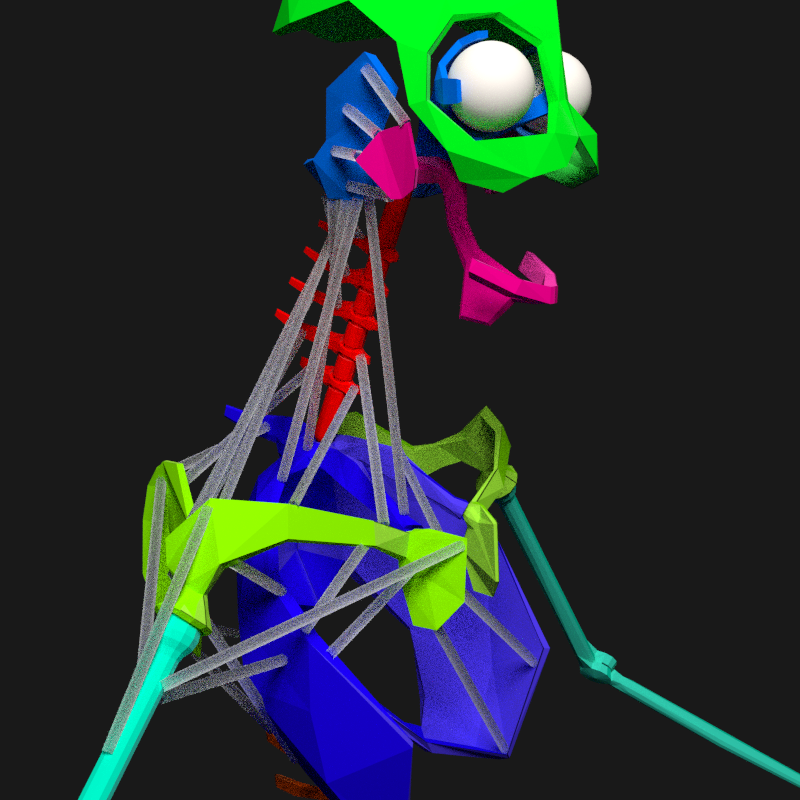
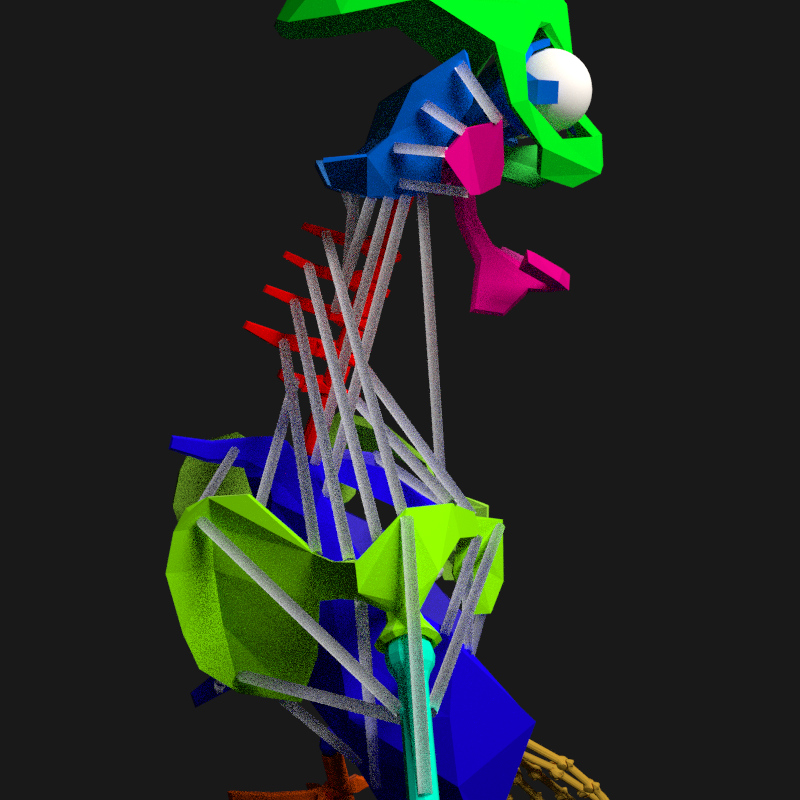
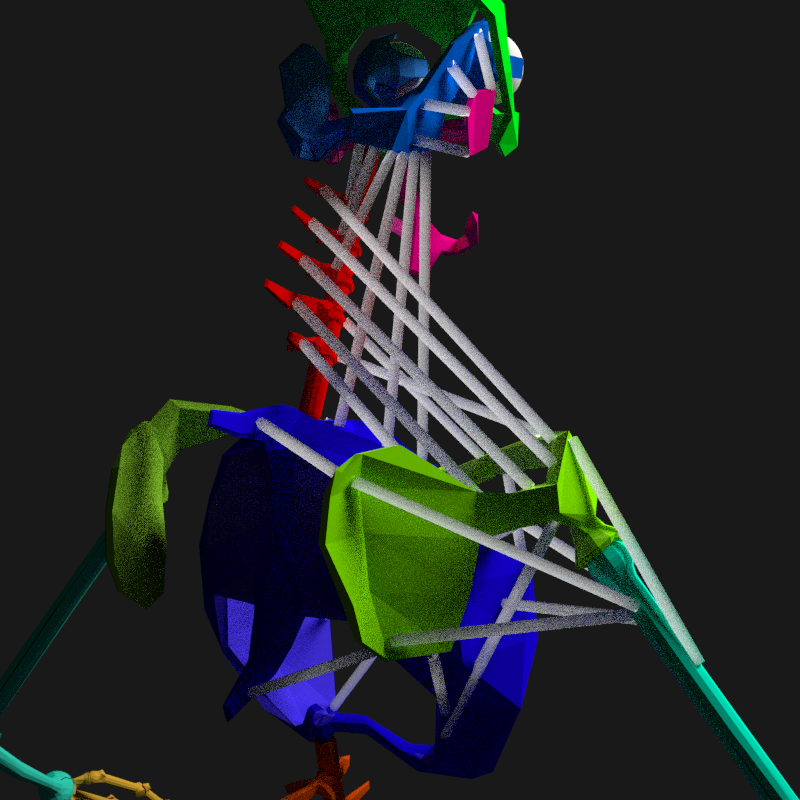
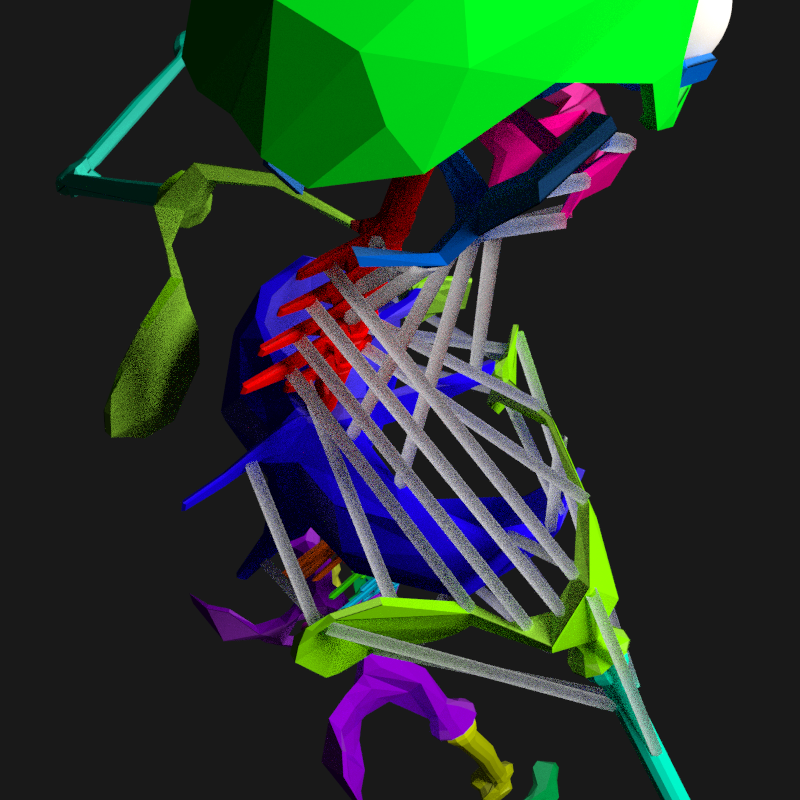
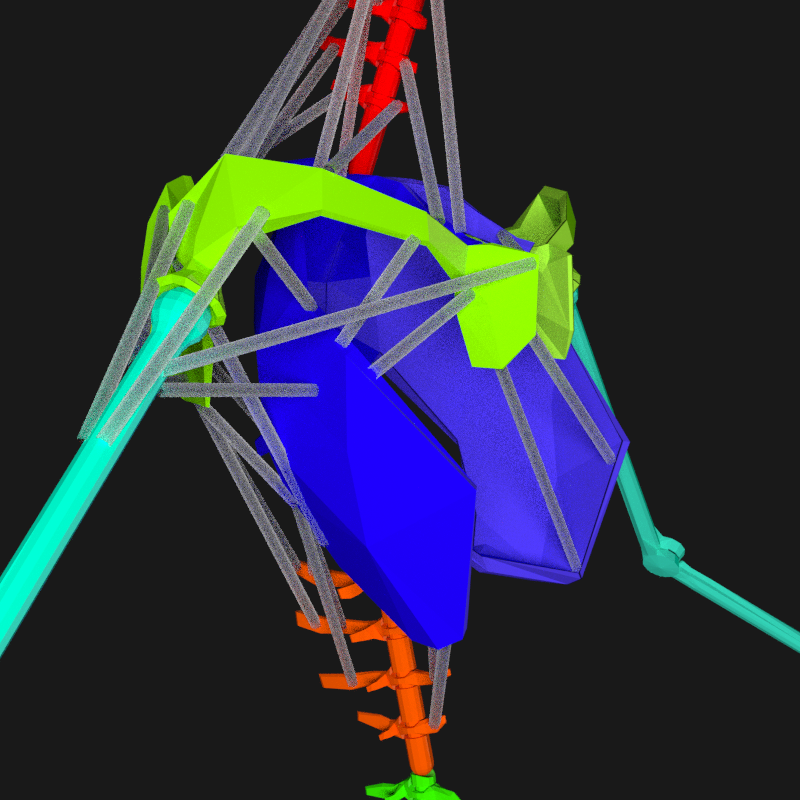
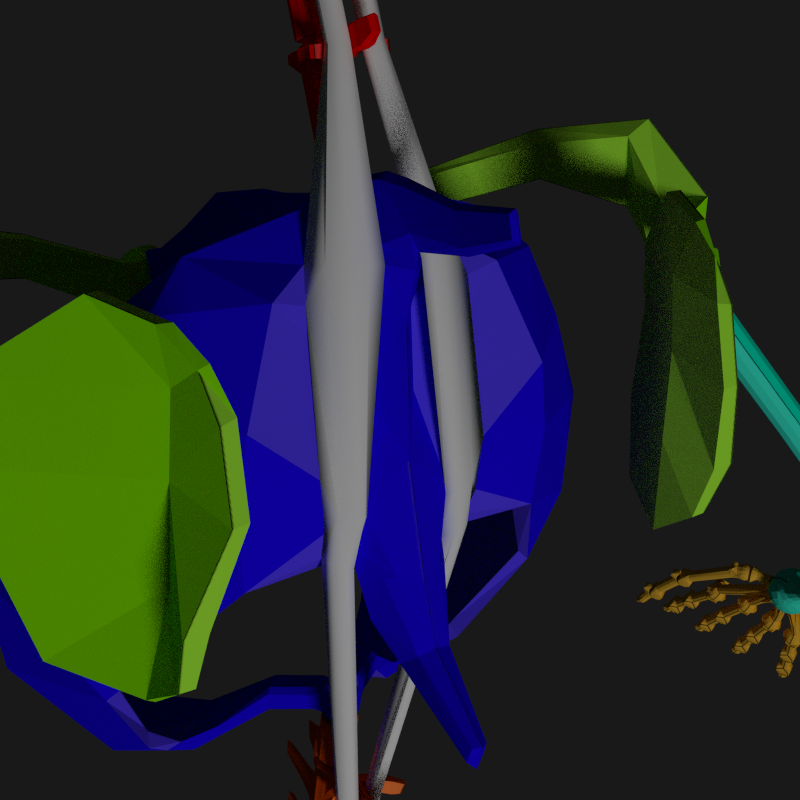
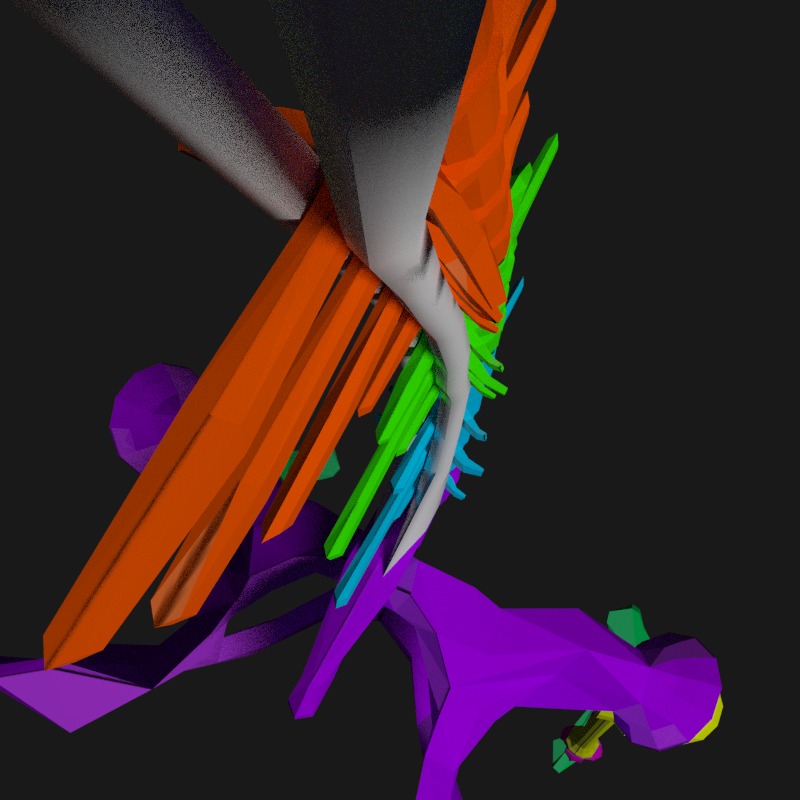
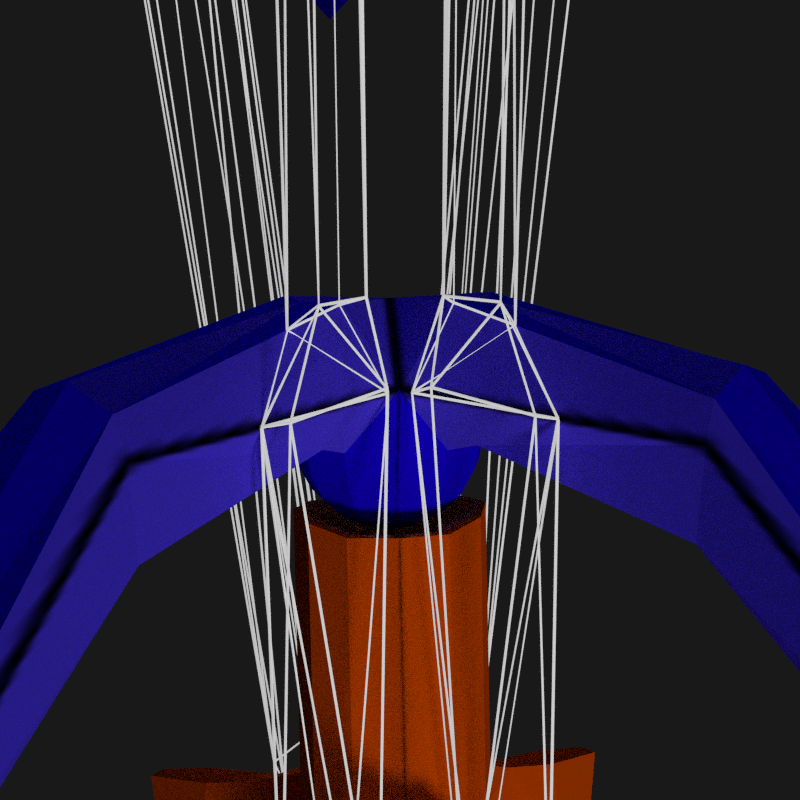
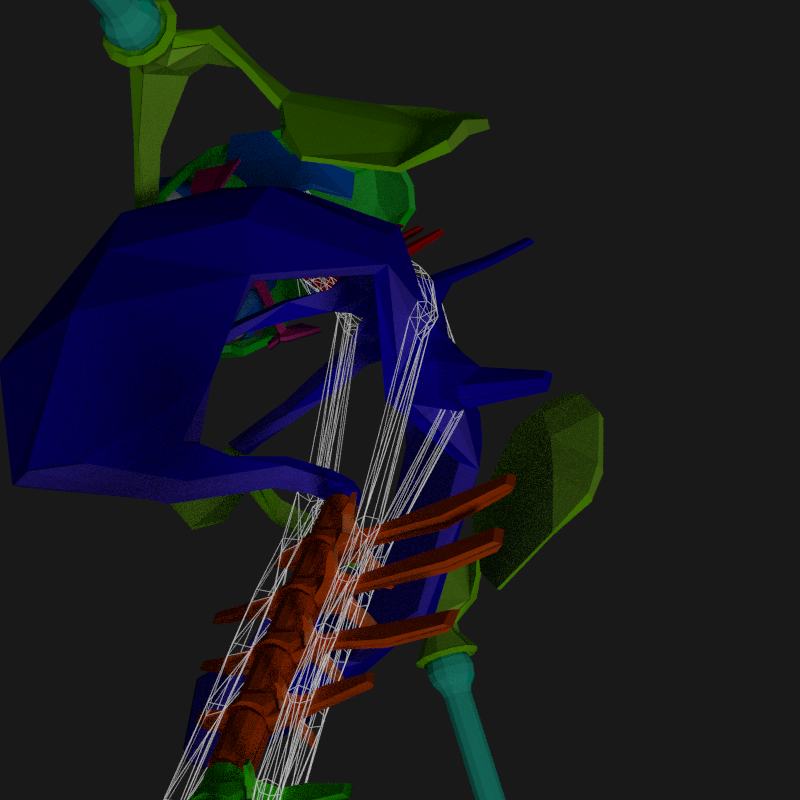
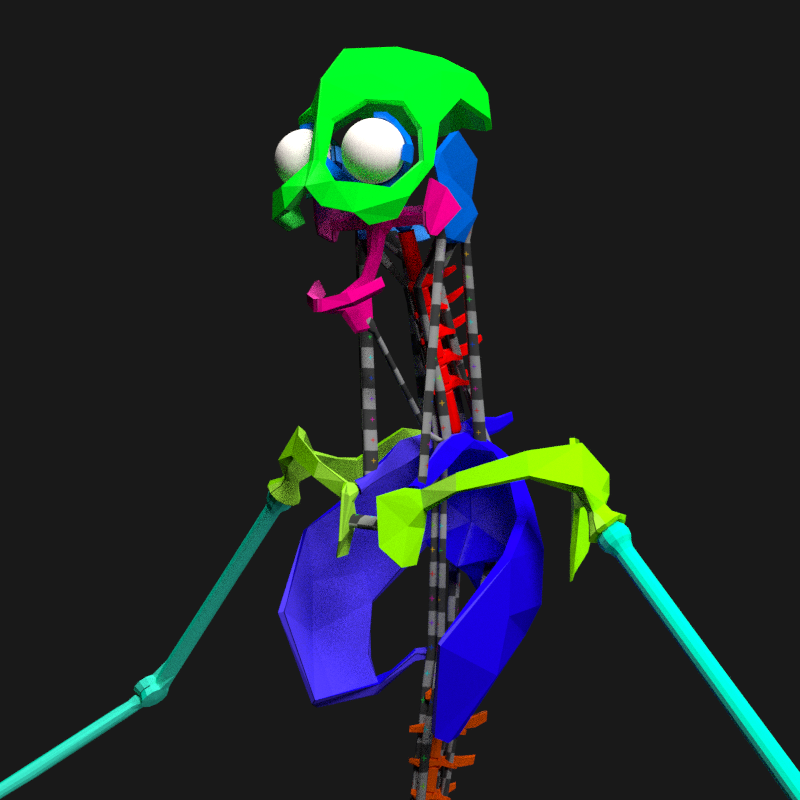
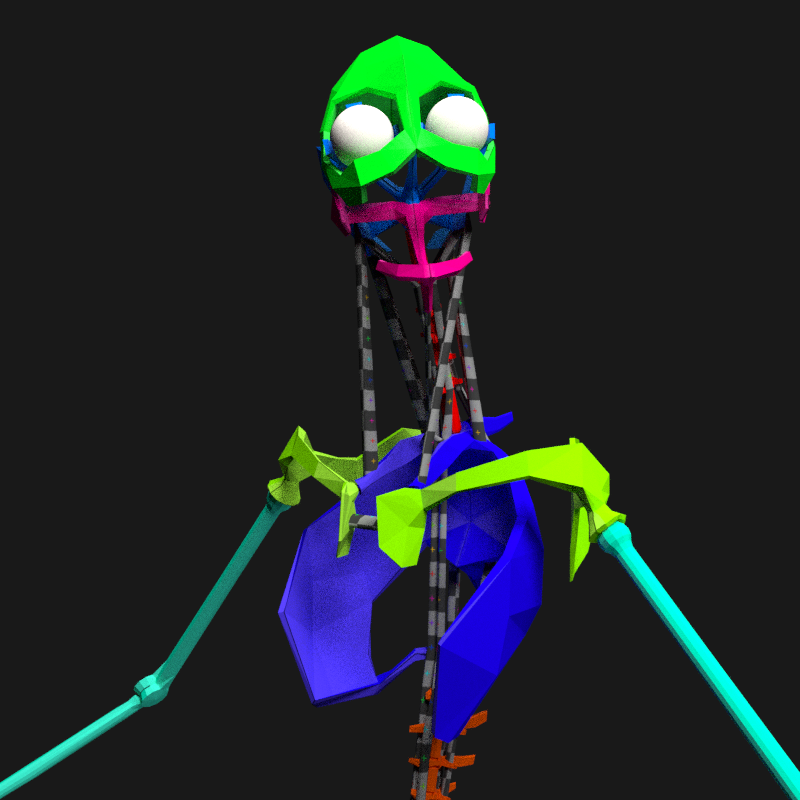
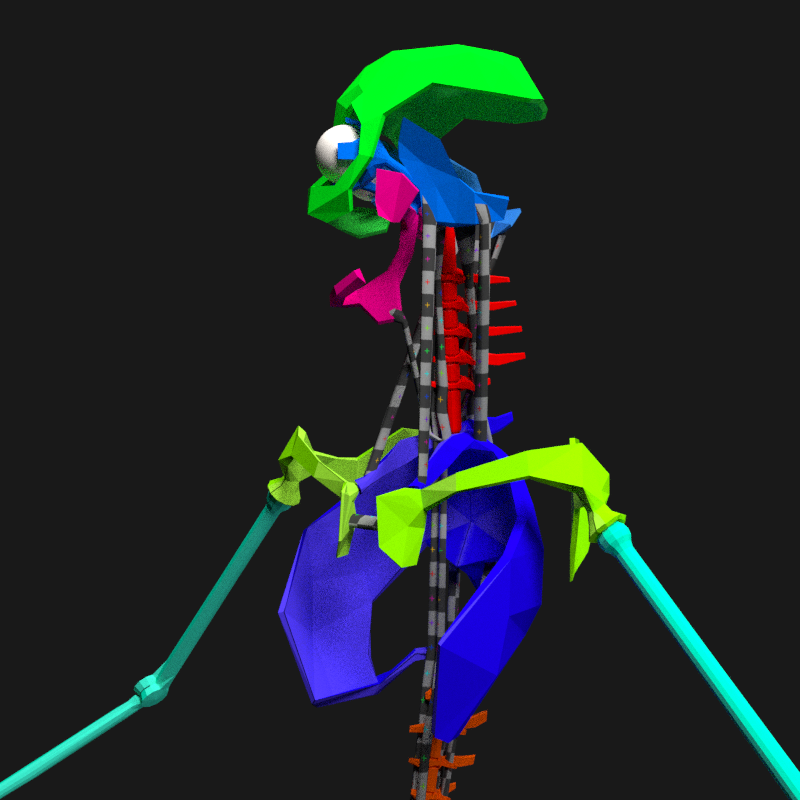
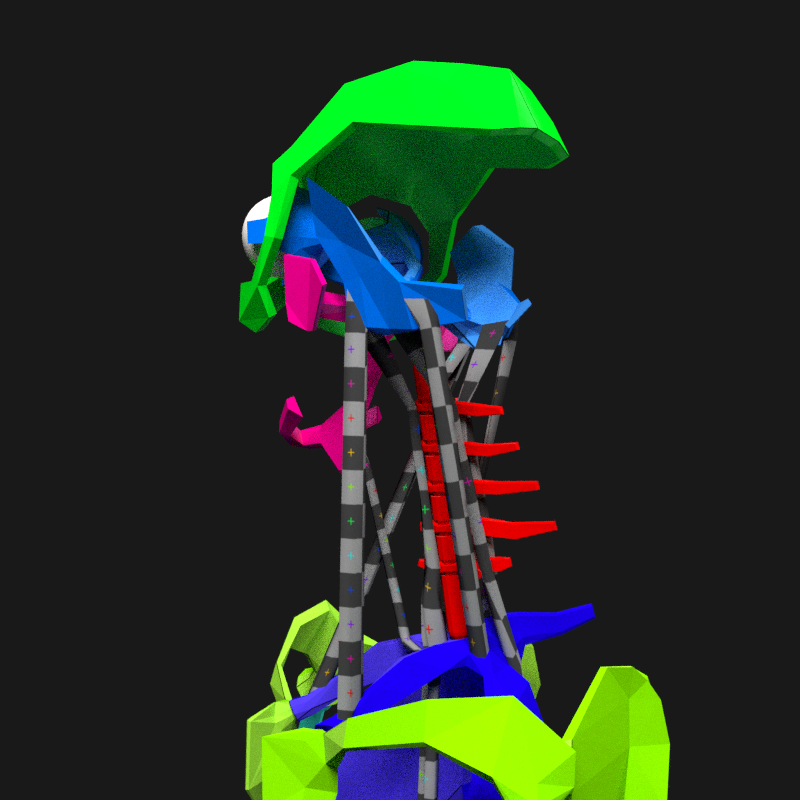
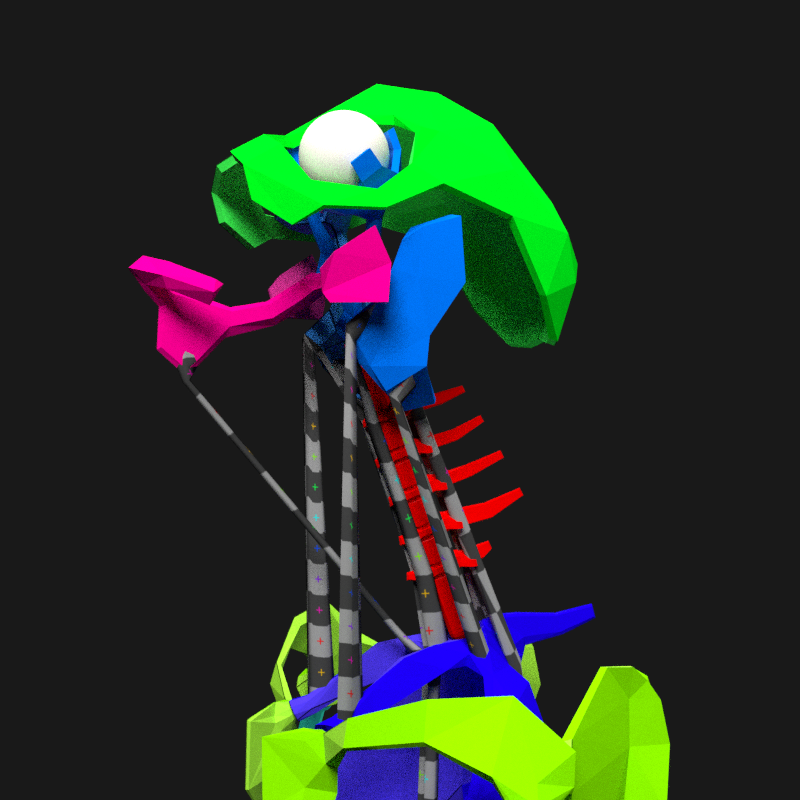
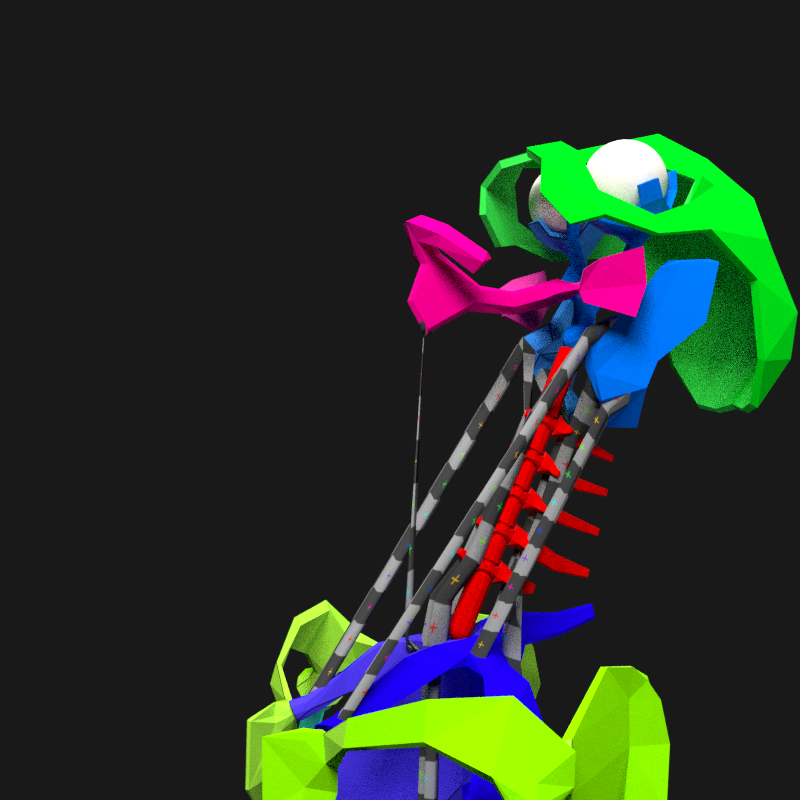
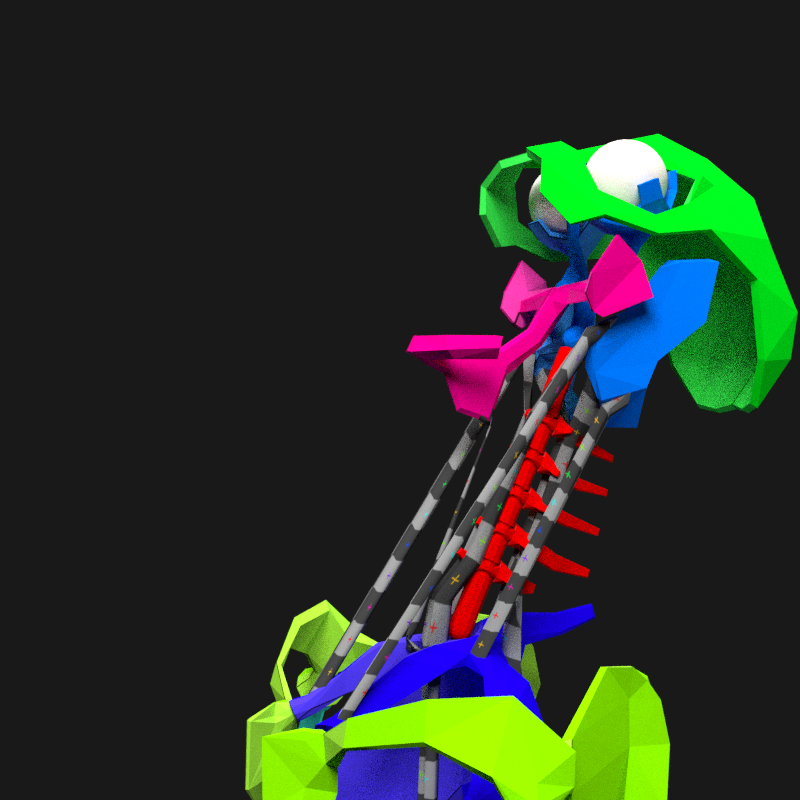
Scapular muscles
Creation of several flexor:
- mastoid (going back of the skull to scapula)
- neck elevator (going back of the skull to neck basis)
- jaw puller (jaw to neck basis)
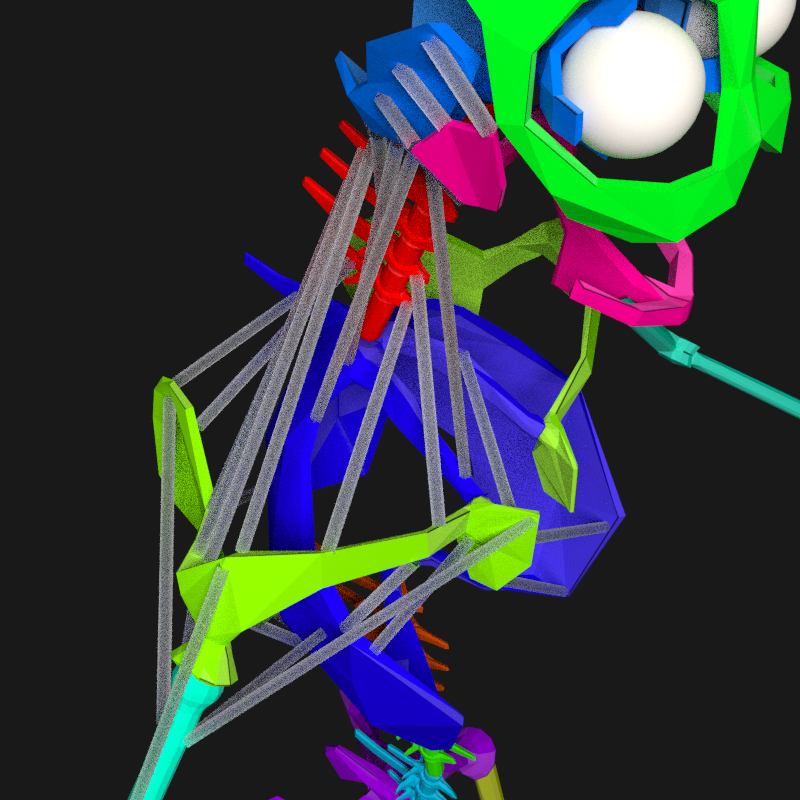
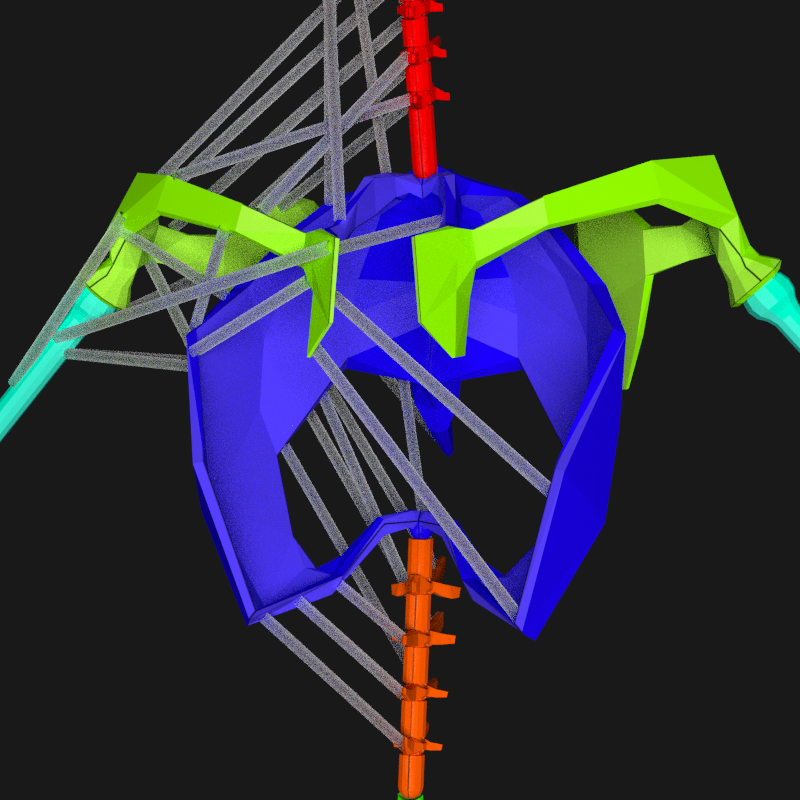
UVs and weight painting has been done. It is quite difficult to find a good face flow for object so bended.
The jaw puller is using a constrained abone. It tracks and stretch to an empty placed at the bottom of the jaw.
Visualisation is becoming messy with the colors of the skeleton > i will move to a neutral material.

{kind=link}
In blender, the work is tedious and slow. Step to test an actuator:
- modelling ruffly the object
- adjustment of mesh for nbone contacts
- first rotation tests
- changing the mesh to minimise the faces collisions during motion
- second rotation tests
- pointing actators collision at extreme rotations, possibly reviewing the mesh anchor points
The UV unwrapping takes several minutes: the mash are really easy to seam.
After watching once again the video of the filament robot, i noticed that s-he prepared the muscles in opensim. After a quick web search, the page SimTK seems to be a good resource's page.
Resources =
physic engine
Simbody is a high-performance, open-source toolkit for science- and engineering-quality simulation of articulated mechanisms, including biomechanical structures such as human and animal skeletons https://github.com/simbody/simbody
musculoskeletal robot
festo air arm
Biomechanical analysis: https://www.youtube.com/watch?v=79yH4fCXv88
A bit more info about how skeletal muscles works: https://www.youtube.com/watch?v=hr1M4SaF1D4
Tutorial about building an air muscle: https://www.youtube.com/watch?v=eDq9hIroTf4
Foot notes
- ↑ activator: object attached to mbones to ensure motion and/or cohesion of the skeleton
- ↑ 2.0 2.1 stator: passive activator (muscle), acting like a tendon, ensures contact between mbones and tends to bring back the articulation in is rest state, by opposition to flexor
- ↑ 3.0 3.1 flexor: active activator (muscle), acting like a muscle, bends the articulations, by opposition to stator
- ↑ 4.0 4.1 straight activators: staying straight whatever the bending/extension, without modification of volume, by opposition to inflatable
- ↑ 5.0 5.1 inflatable activators: staying straight whatever the bending/extension, with modification of volume, by opposition to straight
- ↑ 6.0 6.1 curved activators: curved to go around the articulation they are activating, see elbow sketch
- ↑ 7.0 7.1 7.2 rotor activators: one of the ends is attached to a single point, allowing it to rotate without bending; these activators are only stretching, see bottom of elbow sketch
- ↑ 8.0 8.1 cord activators: these kind of activator is connected to several bones and ensure the cohesion of a large group of bones, see elbow sketch
{kind=link}
{kind=link}